Volumes
# Inefficient Volumes
The following are my personal notes on Lewis Taylor’s fantastic SYDHUG Talk. Definitely worth watching! There is also a download link for all the demo scenes in the video description.
# Impacts of Inefficient Volumes
- Slower simulation time
- balance between needed fidelity and simulation time
- Disk storage
- not as cheap as commonly assumed
- impacts all departments
- Render times
- not only dependent on voxel resolution
- also has to load the cache
- especially for BG elements the overhead to get the files is huge even though the pure rendering might be fast
- Server IO
- not infinite
- more people working at the same time can easily lead to bandwidth issues
- Slow to iterate
- Screwing yourself and your fellow Artist’s out of the resource of TIME
# How to reduce Volumetric Data
- Voxel Resolution - how much do you need for the given Camera/render res
- Bit depth - 32 vs 16 - when does it matter? Can you use 8?
- velocity and even density can be 16 bit in many cases
- color field can easily be just 8 bit in most cases
- Culling fields - remove data in fields that aren’t needed
- delete voxel data in certain areas
- cull velocity by density > if there is no density you won’t need any velocity most of the time
- can take 20%+ of the cache size
- Resampling - reducing voxel res per field - it doesn’t all need to be the same
- density, flame and temperature fields should be better left as they are
- velocity on the other hand can be resampled to half or sometimes even quarter the res as it is only used to smear the other fields in the motion blur
- can remove 65-70% of the cache size
- velocity overhead is usually more than all the other fields combined (vector3)
- Frustum based rasterization - a camera based alternative to Cartesian grids
- added in Houdini 20
- Camera oriented voxel grid
# Frustum Volumes
Instead of orienting voxels along the xyz axis the camera frustum is used to rasterize the voxels to the cameras 2D plane x and y axis as well as the z depth.
# PROS
- This can, depending on the simulation, divide your cache size by 10 or more!
- Especially useful for particle type simulations like whitewater where stuff trails or comes from far away close to the camera. Essentially every shot, where volume travels a fair amount of z depth will profit most from this approach.
# CONS
- cannot be easily reused as it is locked to the camera perspective. Sometimes more caches for different cameras are still smaller than one big cartesian rasterized cache.
- In practice this means you have to rebuild your shaders to match the look of the cartesian rasterized volume 1:1, but it’s not too bad.
- can be problematic when you expect shadows to be cast from a volume outside of your frustum. The lighting may look weird in that case
# Volume Compression
“it really really adds up”
Lewis compared 3 vdbs:
uncompressed 32 bit no field culling no field resampling 34 mb
compressed but still cartesian 16 bit field culling - vel field resample - 2x vel 3.2 mb
compressed + frustum cull 16 bit field culling - vel frustum cull in sim field resample - 2x vel 1.8 mb
# Other Useful Information
# How many Voxels do you need per Pixel?
Usually you are good to go with 1/2.5 voxels per pixel.
# Frustum Rasterizing vs Frustum Culling SOPs vs Frustum Culling DOPs
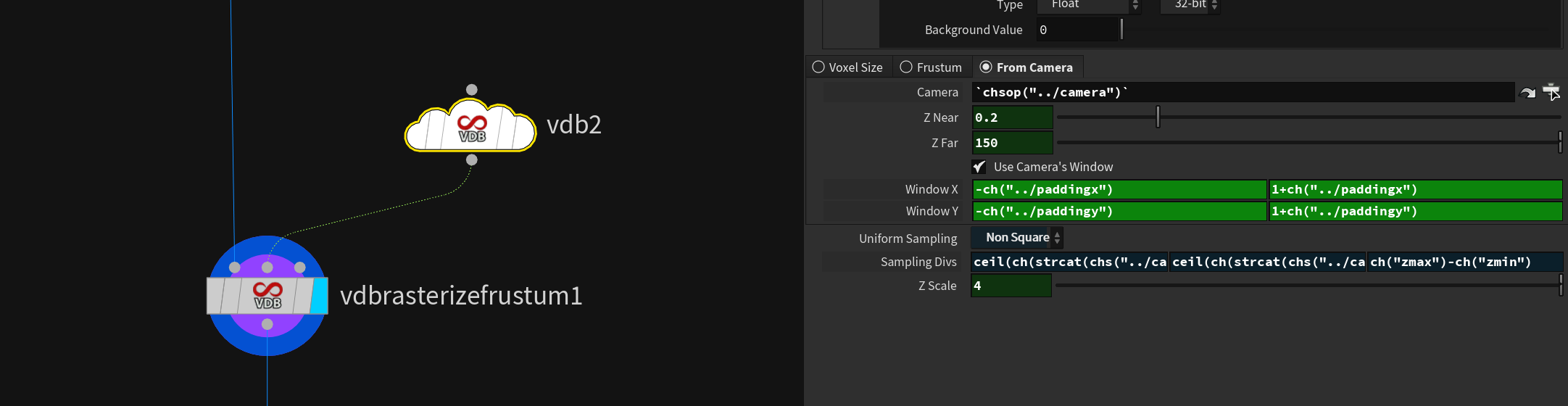
- Rasterizing
You need the VDB Rasterize Frustum SOP and a camera frustum VDB.
- Z Scale on the VDB node controls the amount of voxels in camera depth
- It makes sense to bake in the motion blur using the according parameters on the vdb rasterize node
- Culling SOPs
If you just want to cut off anything outside the cameras frustum you can use the VDB Clip SOP.
- Culling DOPs
To cull right inside the simulation you can use the following snippet inside a Gas Field Wrangle node piped into the advection output of the pyro solver.
// gas field wrangle
| |
sources / further reading: